

 سری ماتریس
سری ماتریستعمیرات کوادکوپتر

بزرگترین مرکز تعمیرات مجاز کوادکوپتر دی جی آی در ایران
مهندسین دکتر دی جی آی برای تعمیرات کوادکوپترها و تشخیص ایراد به صورت حرفه ای آموزش دیده اند. و شما می توانید ۱۰۰ درصد به کار و خدمات ما اعتماد داشته باشید.
تعمیرات کوادکوپترها با قیمت های عالی
آیا کوادکوپتر شما خراب شده است؟ نگران نباشید دکتر دی جی آی برای یاری شما اینجاست.
تعمیر تخصصی کوادکوپتر با مجهزترین متخخصان و بکارگیری قطعات اورجینال انجام می پذیرد.
هر هواپیمایی بعد از تعمیر آزمایش شده و کلیه کارهای ما تضمین شده است.
در وب سایت ما یک درخواست تعمیر کوادکوپتر ارسال کنید و طی ۴۸ ساعت نحوه ارسال دستگاه را از طریق ایمیل دریافت خواهید کرد.در صورت عدم رضایت شما از تعمیر کوادکوپتر و رفع نشدن مشکل یا ایراد دستگاه وجه پرداختی به شما بازگردانده خواهد شد
یکی از خدمات دکتر دی جی آی تعمیر سریع با پرداخت هزینه اضافی می باشد.
برای ثبت درخواست تعمیرات هلیشات و تعمیرات کوادکوپترها روی دکمه زیر کلیک کنید.
برای ثبت تعمیرات کوادکوپترها کلیک کنید
برای ورود به بخش های داخلی تعمیرات محصولات dji روی پرنده مورد نظر کلیک کنید
دکتر dji با سابقه ای درخشان در حوزه تعمیرات کوادکوپترها آماده خدمت رسانی به شما هم وطنان عزیز می باشد
برای ورود به تعمیرا ت dji FPV اینجا کلیک کنید
برای ورود به تعمیرات dji neo اینجا کلیک کنید
برای ورود به تعمیرا ت مویک ایر 2 اس اینجا کلیک کنید
برای ورود به تعمیرا ت مویک ایر 3 اس اینجا کلیک کنید
برای ورود تعمیرات مویک 2 اینجا کلیک کنید
برای ورود به تعمیرا ت اینسپایر 2 اینجا کلیک کنید
برای ورود به تعمیرا ت مویک ایر 2 اینجا کلیک کنید
برای ورود به تعمیرا ت فانتوم 4 پرو ورژن 2 اینجا کلیک کنید
برای ورود به تعمیرا ت مویک مینی 2 اینجا کلیک کنید
برای ورود به تعمیرات مویک مینی اینجا کلیک کنید

نحوه سرویس دهی
سرویس تعمیرات کوادکوپترها شامل بازرسی کامل از هواپیمای شما برای تشخیص هرگونه مشکل و رفع آن است.
پس از اتمام بازرسی تیم فنی با شما تماس میگیرند و برآورد هزینه تعمیر و قطعات مورد نیاز آن را به شما اطلاع می دهند.
پس از دریافت تاییدیه شما ما تعمیر شروع و کامل کرده و تمام سیستم عامل را به روز می کنیم.
سپس قبل از ارسال برای شما آن را مجدداً آزمایش می کنیم.
تاریخچه
انجام تعمیرات کوادکوپترها و نگهداری بر اساس هر پرواز ، در یک بازه زمانی مشخص ، بسیار کارآمد است. به این ترتیب ، زمانبندی دقیقتر احتمال سرویس دهی هواپیمای بدون سرنشین را افزایش می دهد.
بازار هواپیماهای بدون سرنشین تجاری هنوز تقریباً جوان است. در سال 2015 بود که CAA زمینه را برای تنظیم مقررات نظارتی در سراسر جهان فراهم کرد و به صدها شرکت اجازه استفاده از پهپادها را در عملیات خود داد.

تعمیرات کوادکوپترها و هلی شات
کوادکوپترها وهلی شات ها محصولات جدیدی هستند که در ده سال اخیر در میان مردم جایگاه مناسبی پیدا کرده اند
همین موضوع باعث شده است تا آموزش تعمیرات کوادکوپترها نیز یک امربسیار مهم در نظر گرفته شود
تا هرکسی بتواند در صورت بروزحادثه بخشی از تعمیرات را خودش انجام دهد .
کوادکوپتر ها از اعضای خانواده بزرگ ملخ ها حساب می شوند
و به پرنده های چهار موتوره عمود پروازی گفته می شود که با یک باتری قابل شارژ حرکت می کنند .
به هر حال کوادکوپترها ساخت دست انسان هستند ودچار سانحه می شوند.
باید بدانید که قیمت کوادکوپتر و هلی شات هاتقریبا بالاست و جزو محصولات تفریحی سرگرمی گران قیمت و لوکس حساب می شوند .
پس بدون شک خدمات پس از فروش آن ها که شامل تامین قطعه و تعمیرات است نیز باتوجه به قیمت محصول گران است .
در واقع شما کاربران و استفاده کنندگان عزیز باید در نظر داشته باشید که فقط خرید هلی شات حائز اهمیت نیست .
پرواز با خطرسقوط همراه است و شاید در آینده ای دور و یا نزدیک به تعمیرات کوادکوپترها و یا خدمات پس از فروش نیاز پیدا کنید پس باید بودجه ای برای این موضوع در نظر داشته باشید.
آموزش تعمیر هلی شات یکی از مهم ترین نیاز های کاربران بعد از خرید انواع کوادکوپتر و هلی شات می باشد اما آیا واقعا تعمیرات کوادکوپترها کار ساده ای است و هر کسی از پس آن بر می اید؟
درباره هلی شات و کوادکوپتر بدانیم
کوادکوپتر ها به سه دسته کوادکوپتر دسته بندی می شوند:
1.تفریحی
2.نیمه حرفه ای
3.تخصصی
تمامی این دسته ها دارای مدل های بسیار متنوعی است .
تمامی کوادکوپتر و هلی شات ها به همراه آموزش و ارسال رایگان و خدمات پس از فروش جامع و کامل شامل تعمیرات
و تامین قطعات به کاربران عزیزعرضه می شود .
در نظر داشته باشید که قبل از انتخاب و خرید نیز می توانید با کارشناسان خوب ما ارتباط گرفته
و متناسب با نیاز و بودجه تان بهترین گزینه را انتخاب کنید .
نکته مهم
اما نکته مهم در مورد داشتن انواع کوادکوپتر و هلی شات این است
که کوادکوپتر یک وسیله مصرفی است و بسته به شرایط هر خطری می تواند سلامت آن را تهدید کند .
مثلا افتادن در آب و یا برخورد با مانع ها و یا دیوار .
همچنین درست استفاده نکردن از آن و توجه نکردن به آپدیت های دوره ای و تنظیمات دقیق هلی شات نیز می تواند خطر ناک باشد
بسیاری از علاقه مندان بدون شک مهارت و دانش کافی پرواز را ندارند و اکثرا به دلیل هیجان و ذوق زدگی خرید دراولین پرواز به دستگاه آسیب می زنند .
این عجله بدون شک نتایج بدی دارد و امکان دارد ملخ ، فریم و یا دوربین و گیمبال کوادکوپتر صدمه ببینند.
همانطور که قبلا نیز گفتیم تعمیرات و ارائه خدمات پس از فروش برای محصولات لوکسی مثل کوادکوپتر و هلی شات ها بدون شک مستلزم هزینه است
و اغلب هزینه ها بالاست .
از این روی بسیاری از کاربران نسبت به خرید کوادکوپتر دلسرد می شوند و حتی شاید از خرید خود پشیمان شوند .
برای همین از شما خواهشمندیم در ابتدا بسیار دقت و توجه کنید و با عجله دست به پرواز نزنید .
حتی اگر شما به تعمیرات کوادکوپترها نیاز پیدا کردید، می توانید با مطالعه این مطلب آموزشی کارهای مثبت و بی هزینه ای را برای دستگاه خودتان انجام دهید .
حادثه و سقوط کوادکوپترها
اگر در پرواز به هر دلیلی کوادکوپتر شما سقوط کرد و یا با موانع برخورد کرد و برای پرواز دوباره همانند روز اول نبود
و مشکلاتی در آن قابل مشاهده بود اصلا نگران نباشید .
تعمیرات آن درچنین شرایطی آسان است شاید خودتان بتوانید مشکل را حل کنید.
پس برای آموزش تعمیر کوادکوپتر خود به نکات زیر توجه کنید :
توجه کنید اگر درحال پرواز در محیط بسته و یا باز هستید و به دلیل مهارت کم شما کوادکوپتر شما به پرده ،
پایه مبل و یا شاخ و برگ درختان گیر کرد برای جلوگیری از سوختن و یا نیم سوز شدن موتور ها باید اهرم سمت چپ را تا انتها ببندید
تا دستگاه در همان حالت خاموش شود و به زمین بیفتد .
نگران نباشید در این حالت اتفاقی برای دستگاه نمی افتد اما بدون شک گیر کردن یک پره و کارکردن سه
موتور دیگر حتما منجر به موتور سوزی می شود
نکات مهم
اگر کوادکوپترو یا هلی شات شما در آب سقوط کرد حتما آن را از آب خارج کنید و باتری را جدا کنید
و اصلا تحت هیچ شرایطی نباید دستگاه را روشن کنید .
چرا که هلی شات ها اصلا واترپروف و ضدآب نیستند و اغلب با مواد خاصی باید شستشو داده شوند و سپس کامل خشک گردند .
رعایت این دو موضوع بسیار ساده می تواند کمک کند تا میزان خسارت هلی شات شما تا پنجاه درصد کاهش پیدا کند و این موضوعی بسیار خوشحال کننده است.
نکته مهم : معمولا بعد از یک حادثه و یا سقوط کاربر استفاده کننده می خواهد سریعا هلی شات را مجددا به پرواز در آورد و تست کند تا ببیند آیا دستگاه آسیب دیده است یا نه !
ولی این حرکت بسیار اشتباه و خطرناک است و تعمیرات کوادکوپتر شما را پردردسر می کند.
کارهای که هنگام سانحه باید انجام شود
دقت کنید اگر کوادکوپترشما دچار سانحه و یاآسیب دیدگی شد آرامش خود را حفظ کنید و موارد زیر را به ترتیب انجام دهید .
( اکیدا توصیه می گردد در صورتی که پرنده شما دچار آب خوردگی شده است فقط باتری را درآورده و آن را به اولین تعمیرگاه تخصصی برسانید و هرگز ان را روشن نکنید )
در ابتدا سریع باتری را از دستگاه خارج کنید .
آب موجود از دستگاه را کاملا خارج کنید .
سپس بگذارید تا دستگاهتان کامل خشک شود .
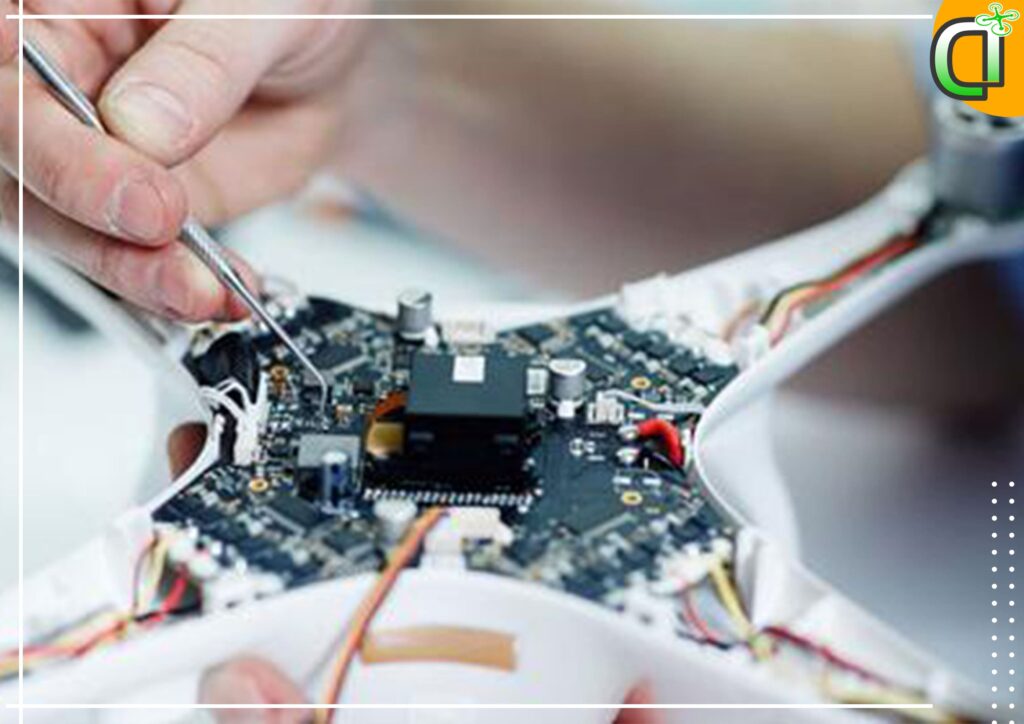
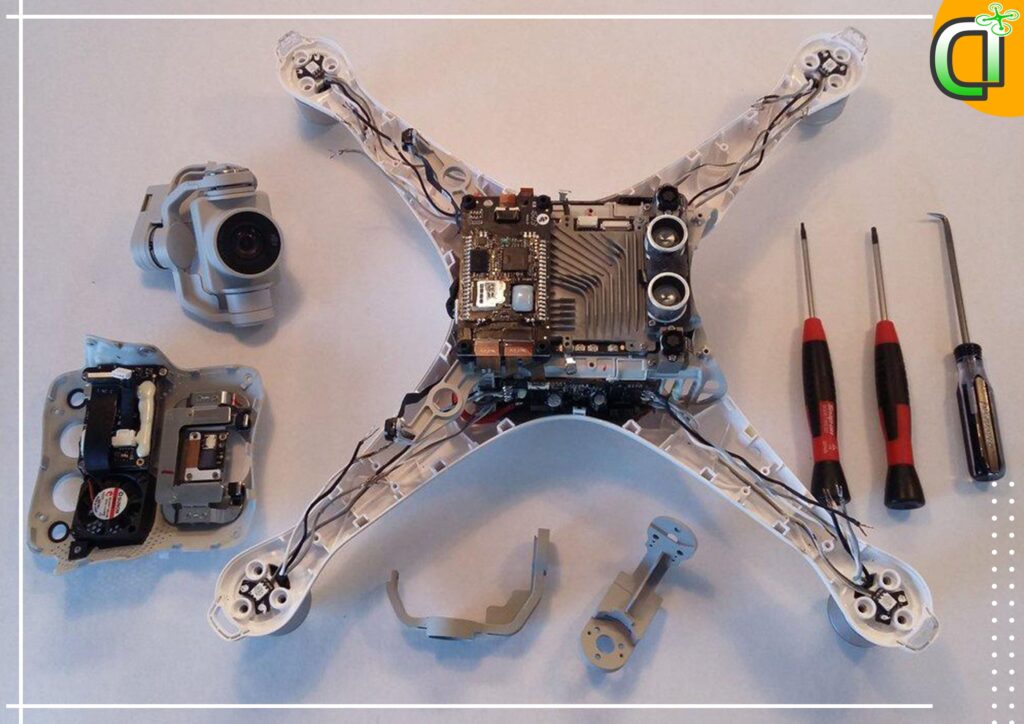
بعد از آن دستگاه خود را به صورت کامل باز کرده و سپس برد اصلی ، موتور ها و تمام قطعات الکترونیکی را با مواد مخصوص شست و شو داده تا تمام املاح از روی برد جدا گردد.
دوباره اجازه دهید تا دستگاه خشک شود .
سپس قطعات باز شده را دوباره در سر جای خود قرار دهید و پیچ ها را ببندید .
باتری را کاملا خشک کرده و توسط تستر باتری بررسی کنید تا ببینید آیای باتری شما سالم است یا نه . اگر سالم بود آن را با شارژر مجدد شارژ نمایید .
کوادکوپتر را روی زمین بگذارید و سلامت ظاهری و ملخ ها را بررسی کنید .
ملخ را در حالت خاموش بچرخانید و ببینید آیا صدای ناهنجاری از موتور شنیده می شود یا نه .
اگر ملخ ها ترک دارند و یا لب پر شده اند آن ها را عوض کنید و در هنگام بستن ملخ ها به A و B بودن آن ها دقت کنید تا اشتباهی رخ ندهد .
باتری را در پرنده قرار داده و پرنده را روشن کنید و ببینید آیا وضعیت نرمال است یا نه !
در صورتی که همه چی نرمال بود موتور ها را روشن کنید و پرنده را به ارتفاع یک متری برده و آن را در محور های حرکتی مختلف امتحان کنید.
نکات مهم برای راه اندازی مجدد کوادکوپتر پس از حادثه :
پس از تست و بررسی سلامت ظاهری ، ملخ و موتور ها باید باتری و مدار دستگاه را بررسی کنید .
در محیطی که تا شعاع ۵ متری مانعی نیست باتری کوادکوپتر را وصل کنید و دستگاه را روشن نمایید
پس از آن چراغ های کوادکوپتر را بررسی کنید و دستگاه را حتما بر روی زمین صاف کالیبره نمایید.
اگر تمام این مراحل را به سلامت پشت سر گذاشتید حالا نوبت به آن می رسد تا موتور ها را روشن کنید و تیکافی امن را تجربه نمایید .
کالیبره کردن هلی شات قبل از هر پرواز و یا بعد از هر سقوط و بروز حادثه و یا تغییر محیط و لوکیشن شما بسیار قابل اهمیت است .
این امر کمک می کند تا هلی شات کاملا صاف و مطمن تیکاف کند.
توجه کنید که در پرواز های اولیه با نصب گارد محافظ ملخ و پایه های لندینگ می توانید ایمنی پروازتان را دو برابرکنید .
همچنین پیشنهاد میکنیم از عکاسی و فیلم برداری هوایی در پرواز های اولیه خودداری کنید و از نصب دوربین بپرهیزید.
معرفی عیوب کوادکوپتر حادثه دیده
ممکن است پس از سقوط و یا بروز حادثه با یکی از حالت های زیر مواجه شوید :
هنگام پرواز کوادکوپتربه یک سمت کشیده می شود :
اگر با چنین مشکلی روبه رو شدید حتما پرنده را بنشانید و آن را کالیبره کنید . در اکثر مواقع این کشیدگی به یک سمت حل می شود.
اگر مشکل حل نشد باید سلامت موتور ها و برد دستگاه از نزدیک توسط کارشناس متخصص بررسی شود .
موتور ها روشن می شوند اما کوادکوپتر پرواز نمی کند :
به احتمال بسیار زیاد موتور ها و دستگاه سلامت است و فقط ملخ ها را به اشتباه نصب کرده اید .
ملخ ها چپ گرد و راست گرد دارند و به صورت ضربدری باید مثل هم باشند
.از این روی باید به نصب درست ملخ ها توجه کنید .
کوادکوپتر هنگام اتصال باتری روشن نمی شود :
در این حالت باید از سلامت و درست شارژ شدن باتری توسط شارژ اطمینان پیدا کنید .
اگر از این بابت مطمئن هستید کلید اتصال جریان را بررسی نمایید تا دچار قطعی و وصلی نباشد .
اگر آن هم نیز سالم است باید دستگاه شما از نزدیک توسط کارشناس فنی چک شود .

کوادکوپتر روشن می شود اما با ریموت اتصال برقرار نمی کند :
در این حالت باید از سالم بودن باتری هایی که درون رادیوکنترل قرار داده اید مطمئن شوید
باتری های آلکالاین انتخاب بسیار استانداردی برای ریموت کنترل کوادکوپتر ها هستند .
اگر باتری ها کاملا سالم هستند از سالم بودن دکمه روشن و خاموش رادیوکنترل اطمینان حاصل کنید.
و اگر هیچ کدام از این ها نبود رادیوکنترل شما از نزدیک و توسط کارشناس فنی باید چک شود
دوربین کوادکوپتر کار نمی کند و به وای فای متصل نمی شود
در ابتدا از اتصال درست سوکت های دوربین مطمئن شوید و اگر باز هم مشکل وجود داشت
باید دوربین شما از نزدیک و توسط متخصص بررسی شود.
در تمامی پنج حالت بالا برد اصلی هلی شات آسیبی ندیده است چون اگر برد اصلی آسیب ببینید
قضیه کاملا متفاوت است اما همین موارد بالا نیز در بسیاری از موارد راه گشا است .
تعمیر برد اصلی کوادکوپتر
آیا اگر کوادکوپتر دچار سانحه و یا سقوط شد و برد اصلی آن آسیب دید تعمیر آن مقرون به صرفه است و یا نه ؟
برد اصلی هلی شات و کوادکوپتر گران قیمت ترین و مهم ترین عضو دستگاه است .
اگر کوادکوپترشما جزو مدل های روز بازار است و برد اصلی آن یافت می شود بدون شک تعویض برد اصلی بسیار عقلانی تر است
و کوادکوپتر شما مانند روز اول می شود .
اما اگر دستگاه شما مدلی قدیمی است و دیگر در بازار یافت نمی شود و کمیاب است
بی شک تعمیر برد اصلی و عیب یابی تخصصی آن و تعویض IC و قطعاتی مثل خازن و یا ترانزیستور توسط کارشناس و تکنسین متخصص کمک می کند
تا مشکل پرنده شما حل شود .
در صورت نیاز به تعمیرات تخصصی حتما به افراد فنی رجوع کنید .
باید این نکته را نیز بدانید که تعمیر قطعات مکانیکی نظیر موتور ها و یا گیربکس از نظر اقتصادی و زمان مقرون به صرفه نیست
و بدون شک تعویض آن ها کاری بسیار عاقلانه تر است .
بنابراین برای تعویض این قطعات با خرید قطعه جدید خودتان نیز می توانید اقدام کنید .
در چه مواردی به کارشناس فنی برای تعمیر کوادکوپترمراجعه کنیم ؟
پیشنهاد می شود در صورتی که شما ابزار ، قطعات و دانش لازم را ندارید به هیچ عنوان برای تعمیر کوادکوپترخود اقدام نکنید .
بخاطر اینکه ، در صورتی که شما دانش لازم را نداشته باشید بجای رفع ایرادات دستگاه منجرب خسارت بیشتر برای پرنده خود شده
و باعث می شوید تا هزینه بیشتری را به دستگاه خود تحمیل نمایید . .
کارشناسان ما با اتکا بر دانش و تجربه می توانند هر نوع کوادکوپتر و یا هلی شات در طبقه بندی هابی ، نیمه حرفه ای و تخصصی را تعمیر کنند .
بی شک پس از بررسی و چک نهایی نتیجه به شما گزارش داده می شود و در صورت تایید هلی شات شما مانند روز اول تحویل شما داده می شود .
در زیر شایع ترین خرابی هایی که برای کوادکوپترها پیش می آید ونیاز به تعمیرات کوادکوپتر پیدا می کنید را عنوان می کنیم. لازم به ذکر است که تمامی این مشکلات و خرابی ها قابل تعمیر می باشند:
- کوادکوپتر روشن نمی شود
- کوادکوپتر روشن می شود اما حرکت نمی کند
- رادیو کنترل کوادکوپتر خراب است
- ارتباط رادیو کنترل با کوادکوپتر قطع می شود
- یکی یا چندتا از ملخ های کوادکوپتر از کار افتاده است
- کوادکوپتر دچار شکستگی شده است
- وجود مشکل در پایه های لندینگ گیر کوادکوپتر
- خالی شدن سریع باتری کوادکوپتر
- سوختگی برد اصلی کوادکوپتر
- سوختگی برد کنترل کننده پرواز کوادکوپتر
- سوختگی برد توزیع کننده توان کوادکوپتر
- سوختگی برد ای اس سی ESC کوادکوپتر
- از کار افتادن شتاب سنج و ژیروسکوپ و خراب شدن سنسور آی ام یو IMU کوادکوپتر
- اتصالی کابل های کوادکوپتر
- و …

بررسی تخصصی کنترل کوادکوپتر از طریق معادلات و توابع
کواد کوپتر که با نام کوادروتور نیز شناخته می شود ، یک هلی کوپتر با چهار روتور است.
روتورها به سمت بالا هدایت می شوند و در یک شکل مربع با فاصله برابر از مرکز جرم کوادکوپتر قرار می گیرند. کوادکوپتر با تنظیم سرعت زاویه ای روتورهای چرخانده شده توسط موتورهای الکتریکی کنترل می شود.
کوادکوپتر به دلیل ساختار ساده ، یک طراحی معمول برای وسایل نقلیه کوچک هوایی بدون سرنشین (پهپاد) است. کوادکوپترها در نظارت ، جستجو و نجات ، بازرسی های ساختمانی و چندین کاربرد دیگر مورد استفاده قرار می گیرند.
کوادکوپتر از آنجا که پدیده های پیچیده کواد کوپتر زمینه های مورد علاقه بسیاری را ایجاد کرده است مورد توجه محققان قرار گرفته است. مدل دینامیکی اساسی کوادکوپتر نقطه شروع تمام مطالعات است اما خصوصیات آیرودینامیکی پیچیده تری نیز معرفی شده است.
روش های مختلف کنترل ، از جمله کنترل کننده های PID ، کنترل برگشت پله ای، کنترل غیر خطی H، کنترل کننده های LQR و کنترل کننده های غیر خطی با اشباع تو در تو مورد تحقیق قرار گرفته است.
روش های کنترل نیاز به اطلاعات دقیق از اندازه گیری موقعیت و نگرش دارند که با ژیروسکوپ ، شتاب سنج و سایر دستگاه های اندازه گیری مانند سنسورهای GPS و سونار و لیزر انجام می شود.
هدف از این مقاله ارائه اصول مدل سازی و کنترل کوادکوپتر به عنوان پایه ای برای تحقیقات و توسعه بیشتر در منطقه است. این کار با دو هدف دنبال می شود. اولین هدف مطالعه مدل ریاضی پویایی کوادکوپتر است. هدف دوم توسعه روش های مناسب برای تثبیت و کنترل مسیر کوادکوپتر است. چالش در کنترل کوادکوپتر این است که کوادکوپتر شش درجه آزادی دارد اما تنها چهار ورودی کنترل وجود دارد.
آنها هم از معادلات نیوتن-اولر و هم از معادلات اویلر-لاگرانژ گرفته شده اند که هر دو در مطالعه کوادکوپترها استفاده می شوند؛ که در آن رفتار مدل با شبیه سازی پرواز کوادکوپتر بررسی می شود.
تثبیت کوادکوپتر با استفاده از کنترل کننده PD انجام می شود.
کنترل کننده PD یک روش کنترل ساده است که به عنوان روش کنترل کوادکوپتر به راحتی قابل اجرا است. یک روش ابتکاری ساده برای کنترل مسیر پرواز ایجاد شده است.
سپس یک کنترل کننده PD در روش ابتکاری برای کاهش اثر نوسانات رفتار کوادکوپتر ناشی از نیروهای خارجی تصادفی ادغام می شود.
مدل ریاضی دینامیک کوادکوپتر ارائه شد و معادلات دیفرانسیل از معادلات نیوتن-اولر و اولر-لاگرانژ استخراج شد. مدل با شبیه سازی پرواز کوادکوپتر با مطلب تأیید شد . مدل ریاضی با شبیه سازی کوادکوپتر با یک مثال به عنوان مثال زیر آزمایش می شود.
کوادکوپتر در ابتدا در یک حالت پایدار قرار دارد که در آن مقادیر تمام موقعیت ها و زاویه ها صفر است ، قاب بدنه کوادکوپتر با قاب اینرسی متناسب است. رانش کل برابر با رانش شناور ، رانش برابر با گرانش است.
تثبیت نگرش کوادکوپتر با استفاده از کنترل کننده PD انجام شد. كنترل كننده PD برای پاسخ بهتر به اختلالات در شرایط پرواز كوادكوپتر در روش ابتکاری ادغام شد. شبیه سازی نشان داد که مدل ریاضی ارائه شده در مدل سازی موقعیت و نگرش کوادکوپتر واقع بینانه است. نتایج شبیه سازی همچنین نشان داد که کنترل کننده PD در تثبیت کوادکوپتر به ارتفاع و نگرش مطلوب کارآمد است.
با توجه به نتایج شبیه سازی ، روش اکتشافی پیشنهادی مسیرهای پرواز خوبی را ایجاد می کند. روش اکتشافی فقط به سه پارامتر برای تولید مقادیر برای پرش موقعیت نیاز دارد. موقعیت و سایر مشتقات آن از مقادیر جهش محاسبه شد.
رانش کل و زاویه های پیچ و رول به دستیابی به شتاب داده شده از معادلات دیفرانسیل خطی حل شده است. سپس ، گشتاورها با شتابهای زاویه ای و سرعت های زاویه ای محاسبه شده از زاویه ها تعیین می شوند. سرانجام ، ورودی های کنترل مورد نیاز از رانش کل و گشتاورها حل شدند.
نتایج شبیه سازی نشان داد که کوادکوپتر با ورودی های کنترل شده با استفاده از روش می توان به طور دقیق کنترل کرد.
روش اکتشافی پیشنهادی اغتشاشات مدلسازی مانند باد را در نظر نمی گیرد و بنابراین کنترل کننده PD در روش کنترل ادغام می شود. کنترل کننده یکپارچه PD در شبیه سازی مثال به خوبی عمل می کند.
کوادکوپتر مسیر مشخص را دنبال کرد و پس از رسیدن به مقصد نهایی شروع به تثبیت کرد. با این وجود ، اگر مقادیر پارامتر به درستی انتخاب نشده و خیلی کوچک یا زیاد باشد ، کنترل کننده PD می تواند عملکرد ضعیفی داشته باشد.
مدل ریاضی ارائه شده فقط از ساختارهای اساسی پویایی کوادکوپتر تشکیل شده است. چندین اثر آیرودینامیکی حذف شده است که می تواند به یک رفتار غیر واقعی منجر شود.
همچنین موتورهای الکتریکی چرخان چهار چرخ نیز مدل نشده اند.
رفتار یک موتور به راحتی در مدل گنجانده می شود اما نیاز به برآورد مقادیر پارامتر موتور است.
موقعیت و نگرش اطلاعات در مدل و شبیه سازی ها دقیق فرض شده است. با این حال ، دستگاه های اندازه گیری در زندگی واقعی کاملاً دقیق نیستند زیرا تغییرات و اشتباهات تصادفی رخ می دهد.
از این رو ، باید تأثیرات اطلاعات نادرست در پرواز کوادکوپتر را نیز مطالعه کرد. همچنین روش هایی برای افزایش دقت اندازه گیری ها باید مورد تحقیق و اجرا قرار بگیرند تا تمام جنبه های مورد نیاز برای مانورهای کوادکوپتر قوی را بهبود بخشند.

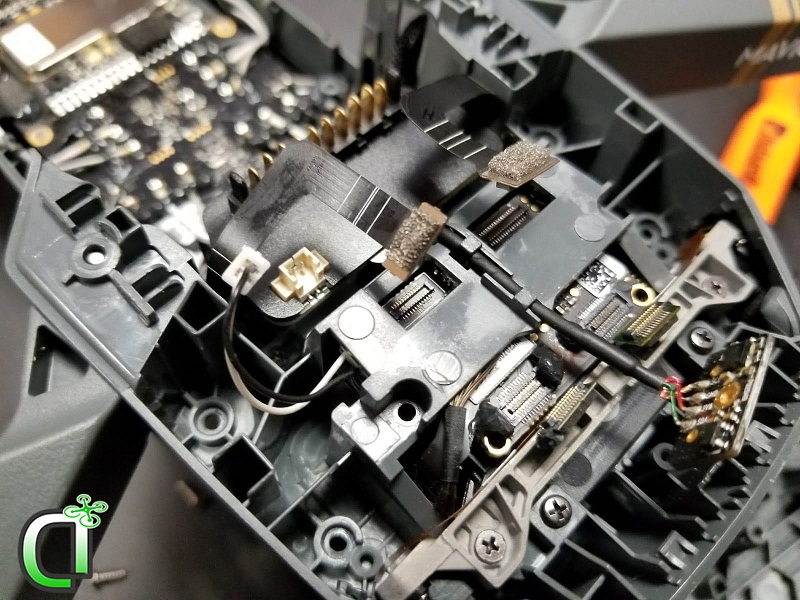
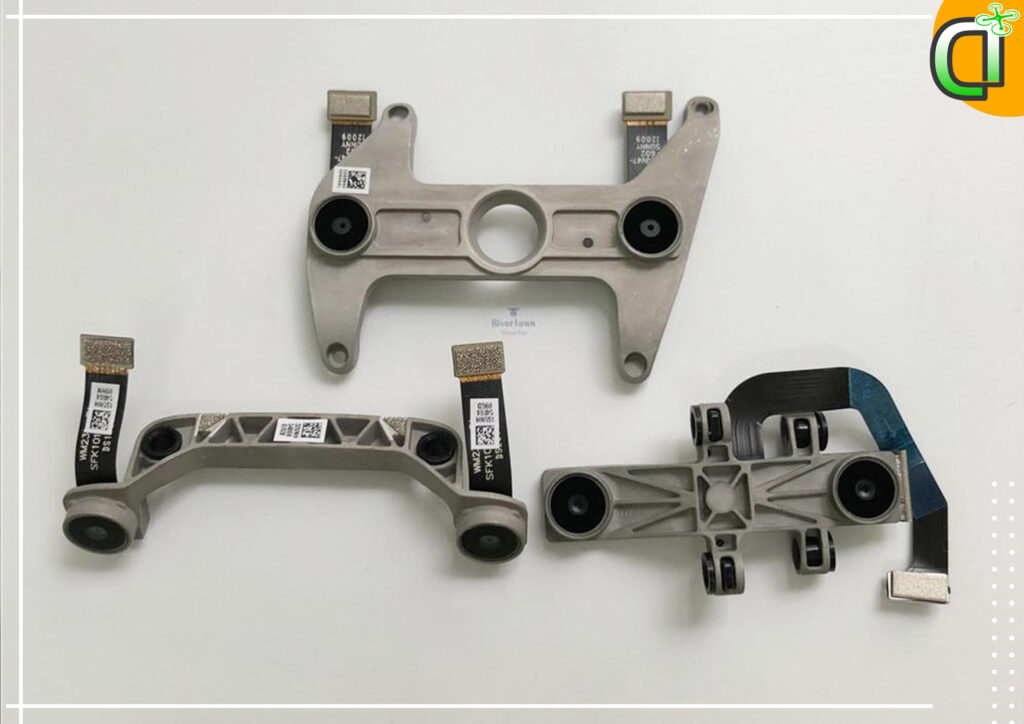
خرابی گیمبال و دوربین
مدل ارائه شده و روش های کنترل فقط با شبیه سازی آزمایش شده است. نمونه اولیه آزمایشی کوادکوپتر باید ساخته شود تا به نتایج واقعی تر و قابل اطمینان تری برسد. حتی اگر ساخت کوادکوپتر واقعی و برآورد تمام پارامترهای مدل کار سختی است ، کواد کوپتر واقعی مزایای قابل توجهی برای تحقیق به همراه خواهد داشت. با یک نمونه واقعی ، چارچوب نظری و نتایج شبیه سازی را می توان با اندازه گیری های زندگی واقعی مقایسه کرد.
این مقاله شامل این موارد نورپردازی نشده در مطالعه نیست اما اصول مدل سازی و کنترل کوادکوپتر را ارائه می دهد. بنابراین این مقاله می تواند به عنوان یک قدم برای تحقیقات آینده در مدل سازی پیچیده تر کوادکوپتر مورد استفاده قرار گیرد. کوادکوپترهای دارای صنعت شتاب دهنده بستر جالبی برای انجام استراتژی های مختلف کنترل هستند.
هدف این پروژه ایجاد یک کنترل کننده سیمولینک مبتنی بر PID و اجرای آن بر روی سخت افزار واقعی برای کنترل نگرش خودرو بود.
این وسیله نقلیه با استفاده از اجزای انتخاب شده و سازگار با یکدیگر با موفقیت ساخته شد.
مدل سیمولینک خودرو بر اساس معادلات دیفرانسیل حرکت مشتق شده ساخته شده است.
مدل سیمولینک کاملاً شبیه سازی شده است و با دادن دستورات RPM به موتورها تأیید می شود تا تأیید کند که مدل پویایی خودرو را نشان می دهد.
یک کنترل کننده مبتنی بر PID برای مدل simulink کوادکوپتر طراحی و تنظیم شده است ، شامل یک بلوک کنترل کننده PID جداگانه برای هر متغیر برای کنترل. یک انیمیشن مسیر سه بعدی برای تجسم ایجاد شده است.
کنترل کننده برای پیاده سازی دنیای واقعی با توجه به سیستم عامل الکترونیکی انتخاب شده اصلاح شده و برای بررسی عملکرد آن بر روی سخت افزار پیاده سازی شده است.
سیگنال های گیرنده رادیویی به اندازه ای مقیاس بندی شده اند که در محدوده سیگنال قابل قبول پین های ورودی و خروجی پلت فرم الکترونیک قرار دارند ، در حالی که فرکانس قابل قبول ESC ها را دارند.
همه ESC ها به طور همزمان کالیبره شدند ، که برای رسیدن به اهداف دیگر پروژه بسیار مهم بود.
یک کنترل کننده مبتنی بر سیمولینک روی سخت افزار کار می کند ، اما به دلیل مقیاس گذاری سیگنال ها و دامنه متفاوت مقادیر سیگنال ورودی به ESC ، کنترل کننده باید دوباره تنظیم شود.
به دلیل تجسم غیر قابل اعتماد در زمان واقعی داده ها ، محدودیت های سخت افزاری و کمبود وقت ، PID ها به درستی تنظیم نمی شوند. در شرایط موجود کوادکوپتر می تواند از زمین بلند شود ، اما بسیار پایدار نیست و در جهت های تصادفی حرکت می کند.

تعمیر باتری مینی 4 پرو، دکتر dji
مجموعه Drdji، به عنوان بهترین مرکز تخصصی تعمیرات هلیشاتهای DJI و سایر کوادکوپترها در کشور، شما را با رویکردی نوین و کادر متخصص آشنا میکنیم. هدف ما ارائه خدماتی است که نه تنها مشکل را رفع کنند، بلکه عمر مفید دستگاه را افزایش دهند و تجربه کاربری را به سطحی بینظیر برسانند. در این متن سعی شده است که بهطور کاملاً یونیک و حرفهای به مبحث تعمیرات کوادکوپتر پرداخته شود تا هم گوگل و سایر موتورهای جستجو بتوانند بهینهسازی لازم را انجام دهند و هم کاربران به قدرتمندی اطلاعات دست یابند.
مجموعه Drdji با برخورداری از تیمی متخصص و فنی، به عنوان مرکز تخصصی تعمیرات هلیشاتهای DJI شناخته میشود. این مرکز با تسلط کامل بر تعمیرات تخصصی DJI، تعمیرات کوادکوپترهای غیر DJI و بهروزرسانیهای نرمافزاری، ارائهدهنده خدماتی جامع است که از تشخیص دقیق تا تعمیر و بازسازی کامل را در بر میگیرد. در فرآیند تعمیرات کوادکوپتر، تیم ما با بررسی دقیق اجزای کلیدی مانند EMC/ESC، موتورها، کنترلر پرواز، سنسورها و سیستمهای ارتباطی، مشکلات هلیشات را به سرعت شناسایی کرده و راهحلهای کارآمد ارائه میدهد. این رویکرد، باعث کاهش زمان تعمیر و افزایش کارایی دستگاههای شما میشود.
یکی از ویژگیهای بارز مجموعه Drdji، تمرکز بر تعمیرات تخصصی DJI است. متخصصان ما با دانش فنی عمیق در زمینه تعمیرات هلیشات، از جمله تعمیرات مکانی و نرمافزاری DJI، قادر به بازگرداندن عملکرد دقیق پرندهها حتی در پیچیدهترین خرابیها هستند. همچنین، تعمیرات کوادکوپترهای غیر DJI در دستور کار قرار دارد تا کاربران با هر برند و مدلی با خاطری آسوده به خدمات دسترسی داشته باشند. این جامعیت، Drdji را به یکی از معتبرترین مراکز تعمیرات کوادکوپتر در کشور تبدیل کرده است.
در طی همکاری با مشتریان، اصل شفافیت و اعتماد در اولویت قرار دارد. تیم فنی ما قبل از هر اقدام، گزارش دقیقی از وضعیت دستگاه، هزینههای مربوطه و مدت زمان تعمیر ارائه میدهد. این شیوه، نه تنها به بهبود رتبه سایت از طریق کلمات کلیدی مرتبط مانند تعمیرات کوادکوپتر، تعمیرات تخصصی DJI و تعمیرات هلیشات کمک میکند، بلکه تجربه کاربری را نیز بهبود میبخشد و مشتریان را از روند تعمیر مطلع نگه میدارد. همچنین، با بهکارگیری قطعات اصلی و معتبر، تطبیق دقیق با استانداردهای فنی و ایمنی در کنار گارانتی معتبر، اعتماد مشتریان را تقویت میکند.
برای ورود به تعمیرا ت dji flip اینجا کلیک کنید
برای ورود به تعمیرات dji neo 2 اینجا کلیک کنید
برای ورود به تعمیرا ت مویک 3 اینجا کلیک کنید
برای ورود به تعمیرا ت مویک ایر 3 اینجا کلیک کنید
برای ورود تعمیرات مویک 3 پرو اینجا کلیک کنید
برای ورود به تعمیرا ت مویک مینی 5 پرو اینجا کلیک کنید
برای ورود به تعمیرا ت مویک مینی 4 پرو اینجا کلیک کنید
برای ورود به تعمیرات مویک 4 پرو اینجا کلیک کنید
در حوزه بهبود رتبهبندی موتورهای جستجو، استفاده هوشمندانه از کلمات کلیدی مرتبط با تعمیرات کوادکوپتر، تعمیرات تخصصی DJI و تعمیرات هلیشات، به همراه محتوای اصیل و منحصر به فرد، از استراتژیهای کلیدی است. این نکته با توجه به خدمات متمایز Drdji و تأکید بر تخصصی بودن تعمیرات، بهبود سئو و دیدهشدن در نتایج جستجو را تضمین میکند. برای کاربران گرامی که به دنبال مرکز تعمیرات با سابقه، کیفیت بالا و پشتیبانی مطمئن هستند، Drdji گزینهای بینظیر است.

Mini 5 Pro breakdown
جمعبندی اینکه چرا دکتر dji به عنوان بهترین مرکز تخصصی تعمیرات هلی شاتهای DJI و سایر کوادکوپترها پیشنهاد میشود، به سه عامل اصلی بازمیگردد:
- تخصص عمیق در تعمیرات DJI و تعمیرات هلی شات
- انعطافپذیری خدمات برای انواع برندها
- و تعهد به شفافیت، کیفیت قطعات و گارانتی.
اگر شما به دنبال تعمیرات کوادکوپتر با کیفیت، سریع و قابل اعتماد هستید، مجموعه Drdji با تیمی مجرب و تجهیزات مدرن پاسخگوی تمامی نیازهای شماست. با اعتماد به این مرکز، از خدماتی با کیفیت بالا در زمینه تعمیرات کوادکوپتر و تعمیرات تخصصی DJI بهرهمند شوید و تجربهای بینقص از پرواز دوباره دستگاه خود داشته باشید.
هدف از کنترل مسیر حرکت کوادکوپتر از محل اصلی به محل مورد نظر با کنترل سرعت روتور کوادکوپتر است. یافتن مسیر بهینه برای کوادکوپتر به دلیل پویایی پیچیده کار دشواری است. با این حال ، یک روش کنترل ساده قادر است کوادکوپتر را به اندازه کافی کنترل کند. بنابراین ، یک رویکرد ابتکاری در اینجا بررسی و توسعه می یابد. اساس توسعه یک روش کنترل مطالعه تعاملات و وابستگی های بین وضعیت و حالت ها ، مشتقات حالت و ورودی های کنترل است.
تعمیرات کوادکوپترها خود را به ما بسپارید.
تعمیرات هلی شات
تعمیرات هلی شات یکی از کلیدیترین خدمات برای کاربرانی است که در زمینه تصویربرداری هوایی، نقشهبرداری، کشاورزی هوایی یا فیلمسازی هوایی فعالیت میکنند. با توجه به پیچیدگی سامانههای پهپادی، از کنترل پرواز تا سیستمهای پاور، هر نقص کوچک میتواند منجر به اختلال در پروژه، افزایش هزینهها یا حتی خطر برای پروازی شود. تیم ما با تجربهای گسترده در تعمیرات هلیشات صنعتی و خانگی، ارائهدهنده خدمات جامع تعمیرات هلیشات، تعمیر Flight Controller، تعمیر ESC و نگهداری پیشگیرانه است تا پروازهای شما امنتر، دقیقتر و پایدارتر باشند.

خدمات کلیدی ما در تعمیرات هلیشات
- تعمیرات تخصصی Flight Controller و ESC: تشخیص خطاهای کنترل پرواز، بهروزرسانی نرمافزاری، تنظیم PID برای پایداری پروازی در شرایط مختلف.
- تعمیرات پیکربندی و استانداردسازی سیستمها: کالیبراسیون IMU و COMPASS، همگامسازی با GNSS، و رفع اختلالات ارتباطی بین کنترلر و پهپاد.
- تعمیرات پاور و باتری: ارزیابی سلامت سلولها، مدیریت سیکل شارژ و تعویض باتری با گواهینامههای ایمنی و استفاده از باتریهای با کیفیت استاندارد.
- تعمیرات موتور و پرهها: بالانسسازی موتور، تعویض موتورهای معیوب، و تعویض پرهها با مصالح ایمن و مطابق با استانداردهای هوافضا.
- تعمیرات گیمبال و دوربین: تعمیر گیمبال، اصلاح فوکوس، تعویض لنز و بهینهسازی تثبیت تصویر برای ویدیوهای باکیفیت.
- مشکلات ارتباطی و OTA: رفع اختلالات رادیویی، بهروزرسانی OTA و تضمین ارتباط بیوقفه بین کنترلر و پهپاد.
- نگهداری پیشگیرانه و سرویس دورهای: بررسی سلامت سیستمهای کمکی، آزمونهای پروازی در محیط امن و تهیه گزارش فنی از وضعیت پهپاد.
مزایای همکاری با تیم تعمیرات هلیشات ما
- تیم فنی با گواهیهای بینالمللی و تجربه عملی در پهپادهای حرفهای و خانگی
- استفاده از قطعات استاندارد و اورجینال برای دوام و ایمنی بیشتر
- گارانتی سلامت قطعات تعویضی و خدمات انجامشده
- مشاوره تخصصی قبل و بعد از تعمیر برای حفظ کارایی و امنیت پهپاد شما
- ارائه گزارش فنی، کارکرد قبل/بعد از تعمیر و پیشنهادهای بهبود
ویژگیهای تمایز ما در تعمیرات هلیشات
- تشخیص دقیق خرابی با تجهیزات پیشرفته و تستهای پروازی در شرایط ایمن
- خدمات سریع بدون کاهش کیفیت با مدیریت دقیق موجودی قطعات
- تعمیر در محل برای مدلهای سبک و شرایطی که ارسال پهپاد امکانپذیر نیست
- پشتیبانی پس از تعمیر برای اطمینان از ثبات عملکرد در پروژههای بلندمدت
ساعات کار و روشهای تماس
- مشاوره رایگان قبل از هر اقدامی
- دریافت پهپاد برای تعمیر یا انجام خدمات در محل برخی مدلها
- ارائه برنامه زمانی دقیق تعمیرات و قیمتگذاری شفاف
بهترین مرکز تعمیرات هلی شات در ایران
اگر به دنبال مرکزی معتبر، تخصصی و قابل اعتماد برای تعمیرات کوادکوپتر در ایران هستید، مجموعه دکتر DJI گزینهای ممتاز است. این مرکز با تیم فنی باتجربه و متخصصان دارای گواهیهای رسمی تعمیر DJI، خدماتی جامع را به کاربران حرفهای و آماتور ارائه میکند. هدف اصلی مجموعه دکتر DJI، بازگرداندن عملکرد کامل پهپاد شما با حداقل زمان غیبت و تجربه کاربری بیدغدغه است.
ویژگیهای کلیدی مجموعه دکتر DJI:
- تخصصی بودن خدمات: تمرکز بر تعمیرات انواع مدلهای DJI از جمله سری Mavic، Phantom، Air، FPV و Inspire با تشخیص دقیق مشکل و استفاده از قطعات اصلی و اورجینال.
- تشخیص و عیبیابی دقیق: اجرای تستهای جامع پیش از تعمیر، بررسی سلامت باتری، سیستمهای GNSS، IMU، بارومتر و گیمبال، تا از بروز مشکلات مشابه در آینده جلوگیری شود.
- قطعات اصلی و استاندارد: استفاده از قطعات اورجینال یا با استانداردهای همسطح جهت حفظ کیفیت پروازی و ایمنی پرنده.
- زمانبندی و شفافیت: ارائه برآورد زمان تعمیر، هزینه قطعی و گزارش مرحله به مرحله کار، با اعلام دقیق مدت دوره تعمیر.
- خدمات تعمیری گسترده: تعمیرات برد الکترونیکی، تعویض پره، تعمیر دوربین و گیمبال، بازسازی سیستمهای کنترل و بهینهسازی عملکرد پروازی.
- خدمات پس از فروش: گارانتی قطعات تعمیر شده و ارائه نکات نگهداری، بهبود عمر باتری و بهروزرسانی نرمافزارها.
- مشاوره تخصصی قبل از تعمیر: بررسی خسارتهای وارده و ارائه راهکارهای تعمیر یا جایگزینی با بهینهترین هزینه.
- پشتیبانی مشتری: پاسخگویی سریع به تماسها و پیامها، حضور در محل کار با گزینههای خدمات در محل یا ارسال پهپاد برای تعمیر.
مزایای انتخاب مجموعه دکتر DJI:
- اعتماد و اعتبار برند: همکاری با تکنسینهای معتبر و تجربهشده در تعمیرات DJI.
- هزینه شفاف و منصفانه: قیمتگذاری روشن بر اساس نوع خدمت و قطعات مصرفی، بدون ای اف کامل.
- کیفیت بالای خدمات: روند تعمیر دقیق، تستهای پس از تعمیر و ارزیابی کامل عملکرد پهپاد قبل از تحویل نهایی.
برای آغاز کار یا دریافت مشاوره تخصصی، میتوانید مدل دقیق پهپاد، مشکل و وضعیت گارانتی را با تیم پشتیبانی در میان بگذارید تا راهکارهای دقیق و هزینههای تقریبی ارائه شود. اطلاعات تماس و ساعات کاری در وبسایت مجموعه موجود است و امکان رزرو وقت تعمیر یا بازدید در محل وجود دارد.
توضیحاتتون خیلی عالی بود ممنون از اطلاعات مفیدی که تو سایت قرار دادید
استفاده کنید و هر جایی که سوال داشتید تیم ما پاسخ گوی شما خواهد بود
سلام وقتتون بخیر من یه کواد کوپتر ساختم میخام مجهز ترش کنم قطعات و شرایطشو ندارم خواستم بدونم شما میتونین کمکم کنید؟
سلام من یه درون دارم یه بازوش کار نمیکنه چی کار کنم افتاده
09149737690
مدل پرندتون چیه ؟
عالی بود.
واقعا کارتون عالیه
خواهش میکنم
کارتون عالی و پیگیریتون برای تعمیرات عالی بود
سلام
اطلاعاتون عالی بود
آیا شما تعمیرات کوادکوپتر parrot هم انجام می دید؟
بله کلیه تعمیرات کوادکوپتر های parrot در مرکز تعمیرات drdji انجام میشه
سلام روزتون بخیر
آیا شما آموزش هم میدید ؟
بله ما دوره تعمیرات هم داریم شما میتونید با ورود به بخش مرکز آموزش دوره ها رو ببینید و ثبت نام کنید.
سلام وقت بخير
drone mini4 pro تو آب افتاد، و ديگه روشن نشد
ايا امكان تعميرش هست ؟ يعني اگر تو آب بيوفته بايد براي هميشه باهاش خداحافظي كنيم يا امكان درست كردنش هست ؟؟؟ممنون ميشم پاسخ بديد🙏🏼
سلام وقت شماهم بخیر باشه بله امکان تعمیر mini 4 pro هست
با تیم پشتیبانی ما تماس بگیرید تا به صورت کامل راهنمایتون کنن
09981444002
دمتون گرم واقعا از کارتون راضی هستم. پرنده من مثل روز اولش شده
وظیفه بود
ممنون از پیج خوبتون
خیلی عالیییی
سلام مطالبتون خیلی عالی و مفید بود
آیا پرنده هاتون گارانتی هم داره؟؟🤔
سلام
بله گارانتی کیفیت خدمات تعمیرات به شما برای مدت زمان 6 ماه داده میشه
سلام
خیلی تخصصی نوشتید توضیحات رو
سرعت عمل در تعمیرات و پاسخگوییتون واقعا عالی بود از یکی دو جا قیمت گرفته بودم و یه کمی قیمتی که گفتید هم کمتر از سایر جاها بود و مهم تر از همه اون سرعت انجام کار بود که واقعا ازتون ممنونم.
سلام بنده بسیار تعریف شما رو شنیدم از دوستان ..
سلام بر شما
این باعث خوشحالی هستش که نظراتتونو با ما در اشتراک میزارید.
سلام
من کوادکوپتر Drone G5max دارم بعد یه روز که داشتم تو پارک پروتز میدادم گیمبال دوربین کار نکرد ولی دوربین سالم بود و ارسال تصویر داشت
بعدا متوجه شدم که سیم های سروو موتور گیمبال تک محور کنده شده
آیا قابل تعمیر هست؟
هزینش چقدره؟
سلام با واحد تعمیرات ما ارتباط برقرار کنید
سلام
واقعا ممنون بابت سرعت عمل بالا و جوابدهی خوبتون
سلام وقتتون بخیر.ببخشید من یدونه کواد کوپتر دارم وقتی پرواز میخواد بکنه نمیتونه بالا بره.باطریشم عوض کردم نشد توضیحاتی هم که بالا دادید نشد.ممنون میشم راهنماییم کنید
سلام
من ۳ سال از dji spark استفاده نکردم . الان باطری ها شارژ نمیشه . لطفا بفرمایید آآیا باطری تعمیر میشه ؟ سپاس
سلام وقت بخیر
تعمیر کار سراغ دارید؟
منظورتون چیه دقیقا ؟
سلام علیکم
خیلی ممنون عالی بود
یه سوال
بنده یک کواد کوپتر خراب خریدم بردش را عوض کردکم الان به یک مشکل برخورد کردم که رادیو کنترل و برد جدید به هم متصل نمی شوم، مدلش s6plus است
ممنون از شما
باسلام یک کوادکوپترi9Max ازآریاکالاخریداری کردم بعدازچندروزی درمنزل امتحان میکردم که کراش کرد و۲تابازوش سمت چپ شکست آیا ممکنه شما تعمیرکنید
سلام و درود لطفا در پیام رسان های داخلی یا خارجی به شماره 09981444002 پیام ارسال کنید و موضوع و عکس پرنده را ارسال کنید
سلام
وقت بخیر
کوادکوپتر کوچک اسباب بازی هم قابل تعمیره؟
سلام اگر قطعاتش موجود باشه بله قابل انجام هستش
سلام ، دی چی آی مدل اسپارک دارم بر اثر سانحه در پوش روی روتور یکی از بازوها محل اتصال پره شکسته و به همراه پره گم شده است، قطعات موجود و قابل تعمیر است ؟
سلام بله موجوده لطفا با ما تماس بگیرید
سلام وقتتون بخیر باشه
گیمبال مدل osmo mobile 2 داشتم وقتی میزنمش به شارژ برای چند لحظه شروع به شارژ شدن میکنه بعد انگار جریان برقش قطع میشه
آیا قابل تعمیر هستش؟
با سلام خدمت شما
رطوبت یا آبخوردگی نداشته ؟
برای بررسی دقیق تر با واحد تعمیرات شرکت ارتباط برقرار کنید
سلام خسته نباشید شما کواد کوپتر های مینی را تعمیر می کنید؟
سلام بله با شماره 09981444002 تلفن واحد تعمیرات ارتباط بگیرید
سلام خسته نباشید، مرکز تعمیرات شما فقط djiها رو تعمیر میکنه، یا برندهای دیگه رو هم قبول میکنید، بنده یکRX DRONEدارم، که برای یه تنظیم ساده پایه لرزه گیر دوربینش، متاسفانه به یک شخص کم تجربه واگذار کردم و الان سوکت یکی از بازوها مشکل پیدا کرده، دستگاه بنده رو هم قبول میکنید برای تعمیر
سلام لظفا با واحد تعمیرات ما تماس بگیرید تا کاملا راهنمایتون کنن
سلام و وقت بخیر
اطلاعاتتون و خدماتتون فوق العاده کاربردی و عالی بود
ممنون
سلام یه سوال من یه پهباد مدل VI88 دارم البته مطمئن نیستم شاید هم مدلش VL88 باشه و در اثر باز کردن 😁که بفهمم داخلش چه خبره 🤦ولی وقتی بستمش دیگه مثل قبل کار نمیکرد هی میره این ور هی میره اونور کلا یه جوریه دور بینش هم که از رو کنترل قابل طنزیم بود هم دیگه کار نمی کنه
میتو نید درستش کنید ؟
سلام یه سوال من یه پهباد مدل VI88 دارم البته مطمئن نیستم شاید هم مدلش VL88 باشه و در اثر باز کردن 😁که بفهمم داخلش چه خبره 🤦ولی وقتی بستمش دیگه مثل قبل کار نمیکرد هی میره این ور هی میره اونور کلا یه جوریه دور بینش هم که از رو کنترل قابل طنزیم بود هم دیگه کار نمی کنه
میتو نید درستش کنید ؟
سلام خسته نباشید
شما کوادکوپتر ام ۹ پرو تعمیر میکنید
گیم بالش بر اثر ضربه از کار افتاده
درود بر شما بله با واحد فنی تماس بگیرید تا راهنمایتون کنن
09981444002
سلام من پهباد syma x5 دارم یه روز داشتم باهاش بتزی می کردم افتاد توی یه خونه رفتم گرفتم
شارژش کردم گذاشتم توی دستگاه روشن نشد😅
یا مشکل از باتریه یا از خود دستگاه……..می تونید تعمیرش کنید؟؟؟؟
شماره۷۵۷”””۰۹۳۵
با سلام
لطفا با واحد تعمیرات تماس برقرار نمایید